IN3032UG: Ethernet Debugger User Guide
Introduction
The Intona Ethernet Debugger is a device to capture packets between two Gigabit Ethernet devices. It provides two ethernet ports, and each port forwards all traffic to the other port, as well as to a PC connected via USB. The intended purpose is low level debugging of anything above the ethernet physical layer, mainly using Wireshark and similar protocol analyzers. It helps when developing your own protocols layered on top of ethernet, developing your own MAC, or just for observing what is going on on your network.
Features
This device can log complete ethernet packets as received by the PHY. There is no processing of captured packets – preamble, SFD, and FCS are all left intact. Packets with incorrect CRC sums are not discarded. Ethernet packets which violate the specification are captured as far it is possible. Some normally invisible low level details are explicitly logged, such as interpacket gaps and CRC errors. Jumbo frames (ethernet packets longer than 1500 bytes) are supported and fully captured up to 16KB size.
Capture output is directly streamed to the PC. There is no kernel device driver. The device is accessed through a libusb userspace driver. You do not necessarily need elevated privileges. Installing the device will not destabilize your system. In particular, the device is not exposed as network device. This has the advantage that your OS will not mess with it. Neither will it attempt to drop or filter packets received through it, nor will it attempt to send random packets to it (ARP etc.). The latter would show up in Wireshark, and confuse your development efforts.
Capture can be directly started from Wireshark (if installed correctly). The userspace driver also provides a command line interface, which can be used to access advanced feature. An IPC interface is provided for use cases like scripting.
The debugger can block packets in one or both directions, corrupt packets, inject new packets. This is interesting for development and security research. (For example, you can test resilience of your ethernet connected device or software against random packet drops, test its behavior on flooding, or implement a network stack fuzzer.)
The device does not require or force firmware updates. No special kernel or device drivers are required on Windows, macOS, or Linux. Installation of the userspace driver is minimally intrusive, or can be used without system-wide installation.
There are many other features. See Other features section.
Requirements
The software works on Windows, Linux, and macOS. We provide an installer for Windows. Windows 10 64 bit is required. Windows 7 may work as well (extra steps required, see installation instructions). For macOS, a homebrew tap is provided. For Linux, source code and build instructions are provided, which should work on any Linux distro.
USB 3.0 or later host and cable are recommended. USB 2.0 may work in low bandwidth scenarios. Using an USB hub, and/or connecting multiple USB devices to an USB hub/host may reduce the maximum bandwidth at which capture is possible without capture overflows.
Restrictions
Ethernet is intercepted by putting two PHYs between the two ports. There is no direct connection between the ethernet TX/RX wires of the ports. Each PHY negotiates the ethernet connection separately. No link can be established without USB power.
Old firmware (before 1.06) requires the user to set the ethernet speed manually if the devices connected to the debugger's ports negotiated different ethernet standards (for example 100 MBit vs. 1 Gb).
The PC needs to be fast to capture at full speed. Capturing in real time with maximum ethernet bandwidth directly to Wireshark or a slow hard disk may not be possible. (This is due to host performance problems outside of our control.) Packet buffer overflows should be expected when operating near maximum bandwidth. There is no hardware packet filter.
Firmware Changelog
The firmware version is reported in the bcdDevice field in the USB device descriptor, or can be determined by using the "hw_info" command in the host tool.
Firmware 1.11
Updating to host tool v1.7 is recommended.
Bug fixes
- Better device/host clock synchronization for packet timestamps
Firmware 1.09
Updating to host tool v1.5 is recommended.
Bug fixes
- Fix hardware FIFO overflow problems with high bandwidth and very small packets (possibly out-of-spec)
- Fix capture corruption problems in some rare low bandwidth capture scenarios
Firmware 1.08
Updating to host tool v1.3 is recommended.
Bug fixes
- Fix occasional packet corruption with some links in 100 MBit mode (this affects both packet capture and ethernet communication)
- Hopefully fix 10 MBit mode
- Improve speed settings handling (always enable auto negotiation and control advertisings instead)
- Work around a FX3 issue that made firmware updates under USB 2 very slow
Potential incompatibilities and problems
- The "inject" command now works only if both links are connected and use the same speed mode
Firmware 1.06
Updating to host tool v1.2 is recommended.
Bug fixes
- Fix device becoming unable to capture packets on FIFO overflows
Potential incompatibilities and problems
- This is compatible down to host software v1, but host software v1.2 is recommended; there may be strange behavior with host software v1 in certain cases
- The device accesses some MDIO registers automatically now, instead of leaving the host software in full control
New features
- Add autospeed mode (do not require user to manually adjust each PHY's speed if they have negotiated different speeds)
- The autospeed setting is persistently stored on the device
- Improved packet timestamp accuracy
Firmware 1.00
- Initial release.
Host Tool Changelog
The host tool's version can be determined with the "hw_info" command, or simply running "nose --version".
Note: you can also look at the public git repository's commit log.
Host tool git master
Unreleased, but publicly available. (Also picked up by Homebrew formulae.)
May be referenced as host tool v1.8 in this document.
Host tool v1.8 (74fa76e, windows build 72)
Bug fixes
- Fix incorrect display of the device USB BCD version (including firmware updates), which affects future firmware updates starting with firmware 1.11
- Use better device/host clock synchronization for packet timestamps as offered by devices running firmware 1.11
Host tool v1.6 (c60e992, windows build 67)
Bug fixes
- Windows: restarting capture in Wireshark extcap mode often didn't work and showed errors
- Try to behave better if opening the device failed in Wireshark extcap mode
- Windows: bundle firmware v1.09 (update needs to be started manually with firmware-update.bat)
Host tool v1.5 (bfafb93, windows build ?)
Potential incompatibilities and problems
- Improvements to packet parsing (including firmware v1.09 specifics), which should not cause any problems, but could
- Change "Bytes captured" display in the capture stats, uses different rounding
Bug fixes
- Skip possibly old data when starting capture
- Fix description of some hw_info fields
- Fix undefined behavior in USB error handling path
New features
- Add --nopad, --bw-bytes, --bw-packets parameters to "inject" command
- Add --update parameter to "hw_info" command
- Add --capture-speed-test command line option
(The Windows build was incorrectly tagged as v1.4, but used the correct commit bfafb93.)
Host tool v1.4 (60a3f48, windows build 66)
Potential incompatibilities and problems
- Change auto-exit behavior (should be mostly the same for most users, but use with scripting might be affected)
- Change --exit-on option in an incompatible way
Bug fixes
- Fix sporadic hangs when nose exits (these could even hog the USB device and prevent restarting capture)
- Handle unusual preamble lengths better (for example, do not cut off data bytes at the start of the packet on short preamble)
New features
- Option to strip FCS (CRC field) from captured data (--strip-fcs)
Host tool v1.3 (cfbdb79, windows build 64)
Bug fixes
- Correct doubled injector packet count reported by hw_info command
- Work around problems with libreadline 8.1
- Fix "inject" command (may need firmware 1.08 for larger packets)
- Adjust maximum packet size capture limits
New features
- Latency tester feature
- Tab completion (if built with readline; dysfunctional on Windows)
- New options: --cmd, --run, --exit-on, --exit-timeout
Host tool v1.2 (ff97f53)
Updating to firmware 1.06 is recommended.
Potential incompatibilities and problems
- Firmware update is now invoked differently
- Changes to inject and disrupt command parameters
Bug fixes
- In Wireshark extcap mode, terminate properly if no packets were captured
New features
- Full support for firmware 1.06
- Slightly improved link status reporting
- Extend capabilities of inject and disrupt commands
- Change USB device name format and include device address (allows distinguishing multiple devices connected to chained hubs)
- Accept device serial number as device name and report it via extcap to Wireshark
- Add quoting/escaping and named arguments to command parser
- Perform more parameter validation in command/option parser
- Unify PHY/port names to A/B/AB/none (a mix of conventions was used before)
Host tool v1.1 (686fe4f)
- Add "speed" convenience command
- Improve capture stats log behavior
- Note that this used to be untagged in the public git repository
Host tool v1 (f5eed9c)
- Initial release
- Note that this used to be untagged in the public git repository
Hardware Setup
The ethernet debugger needs to be powered via USB to forward any packets. Without power, communication between the two ports is blocked. Make sure USB cable and host port are at least USB 3.0 compliant. If you use USB hubs or USB isolators, make sure they all support USB 3.0. USB 2.0 will work, but will provide degraded functionality, as USB 2.0 bandwidth is lower than that of Gigabit Ethernet.
Attach the ethernet cables to the ports. Make sure you are breathing regularly. As soon as both port LEDs indicate a connection, and the negotiated ethernet speed matches between both ports, communication is possible.
LED Meaning
Port LEDs
The LED in use indicates the ethernet speed mode. If packets are sent or received, the corresponding LEDs will blink.
| Speed | LED L | LED R |
|---|---|---|
| 1000 MBit | off | on |
| 100 MBit | on | on |
| 10 MBit | on | off |
| no link | off | off |
Note that it's possible for one port to have a link, while the other port does not. They also can have mismatched speed. In both cases, capture will not work.
Main LED
Normally, the main LED should be blue. It will blink if capturing is in progress. The following states exist:
| LED state | Meaning |
|---|---|
| Blue | USB super speed connection is up |
| Green | USB high speed connection is up (slow, but functional) |
| Cyan | USB power only (will not work) |
| Blue blinking | capturing at USB super speed is in progress |
| Green blinking | capturing at USB high speed is in progress (will drop packets) |
| Blue/green blinking | the blink_led command is being used (only for a short moment) |
| Red | initial bootloader failed (probably flash problem) |
| Red blinking | bootloader failed (probably flash problem) |
| Off | low level bootloader/firmware crash, or no USB power |
| Red/yellow blinking | fatal higher level firmware error |
| Red/blue or Red/green blinking | firmware update failed; running factory firmware version (The blue/green color indicates USB speed, see above.) |
When you experience problems, it is useful to describe the LED state exactly in support requests, even if the observed variant is not listed above.
Software Installation
The software consists of a host tool, called "nose". It performs the following roles:
- userspace driver for the device
- Wireshark integration via Wireshark extcap
- command line tool for explicit access
Linux
No binaries or packages are provided. You can build it from the public git repository. Binary builds or packages for popular Linux distributions may be provided if there is enough demand.
- build the host tool from the git repository (see https://github.com/intona/ethernet-debugger#build-instructions)
- create a symlink for Wireshark extcap (see Wireshark section for details)
You may need to install an udev rule to get access to the USB device as normal user:
sudo cp udev.rules /etc/udev/rules.d/50-intona-ethernet-debugger.rules sudo udevadm trigger
macOS
No binaries are provided. Hence the software is provided as source code, you can automatically download and build it using Homebrew.
brew install --HEAD intona/ethernet-debugger/nose
Homebrew is a 3rd party project for installing freely available software on macOS. See https://brew.sh/ for details and how to install Homebrew itself.
You need to setup Wireshark extcap manually. See below.
We decided to not provide binaries for macOS because it is quite impossible to deliver unified, stable executables that will work on various releases of both software API and CPU types. Think of the platform change to ARM. This is no issue when compiling from sources using Homebrew.
Windows
Windows 10 or later 64 bit is required (but see Windows 7 section below). An installer is provided on the download page.
- make sure that Wireshark is installed before you proceed
- double-click the installer
- press next a lot of times
It does not matter whether the device is connected during installation. In fact, the installer does not try to access the device at all.
You can reinstall any time. Updating Wireshark might remove the Ethernet Debugger Wireshark integration. Reinstalling the Ethernet Debugger will restore it.
Windows 7
The device can be used with Windows 7. There are the following issues on Windows 7:
- Separate installation of a dummy device driver using Zadig is required. (See below.)
- Most Windows 7 installations are 32 bit only. The normal installer is 64 bit only, and will not run. A 32 bit build of the installer is provided separately on the download page.
- The host tool can not use as much memory for capture buffers, or may run out of memory. There is no solution for this, but as long as enough physical RAM is available, the default settings should not trigger an out of memory situation.
- Wireshark may stop working on Windows 7 in the future. In fact, they offer no 32 bit builds for the latest Wireshark stable release.
- There may be compatibility issues in the host tool, that are not present on Windows 10. There may be compatibility issues with older Wireshark versions, which you will be forced to use on Windows 7.
As noted above, you need to install a device driver with a 3rd party tool, or the host tool won't be able to access the device. This is not necessary on Windows 10, because we use libusb, and our device uses a feature, that essentially tells Windows 10 that it's a libusb-based device. (A technical explanation can be found here.) On Windows 7, a dummy device driver is required, which contains no executable code, and merely tells Windows that it needs to use the Microsoft WinUSB driver (used by libusb) with the Ethernet Debugger. Since signing and installing a device driver is a lot of work, the host tool installer has no support for this. Fortunately, a simple 3rd party tool called Zadig exists: https://zadig.akeo.ie/ This tool can generate and install a dummy driver for any libusb-based devices. Follow the instructions on its website, select the Ethernet Debugger device entry, and install a driver. Then capture should work.
Verifying Device Access
A simple way to verify whether the software works is by simply running the host tool. It is a command line program. On Windows, double-clicking nose.exe will open a terminal window, while on Unix, you need to open a terminal window manually, and then run nose in it.
If the installation succeeded, and the device is connected, you should see the following:
Device 2:3:7 opened. PHY A: link=down speed=0MBit PHY B: link=down speed=0MBit Warning: no link.
The example above has the device on USB bus 2, port 3, device address 7.
If the device could not be found or accessed, the following is shown:
No devices found.
You can stop the host tool by closing the terminal or by entering the "exit" command.
Wireshark extcap Setup
Wireshark is the recommended way to use the Ethernet Debugger. It is 3rd party software and not developed by Intona. Download and install it from Wireshark's website: https://www.wireshark.org/download.html
Normally, the Windows installation procedure installs our host tool as a Wireshark "extcap". In short, "extcap" allows external programs (such as our host tool) to provide a capturing source. See the Wireshark extcap section for details. If the host tool is not correctly installed as extcap source, you will not be able to start capture from the Wireshark GUI (but other methods of capturing will still work.)
The host tool supports extcap directly via special command line parameters. It must be located in the "extcap" sub directory within the Wireshark installation directory or the user's Wireshark configuration directory. The paths depend on the operating system and the Wireshark installation location.
You can confirm whether it's installed correctly by opening the Wireshark about dialog, and switching to the "Plugins" tab. There should be an entry named "nose".
Old Wireshark versions
The non-global/user-specific extcap paths below require at least Wireshark 3.1.1. Older releases support global paths only.
Linux, macOS
It is recommended to create a symlink to the host tool. The global path is something like /usr/lib/wireshark/extcap/ or /usr/lib/x86_64-linux-gnu/wireshark/extcap/. The exact path depends on the Linux distro. The user-specific path is usually ~/.local/lib/wireshark/extcap/, but it may different in older and newer Wireshark releases.
In all cases, you can check the paths and the list of loaded plugins in the Wireshark Help / About Wireshark dialog. "nose" should be listed as an extcap plugin.
The following should install it locally, assuming "nose" is already installed:
mkdir -p ~/.local/lib/wireshark/extcap/ ln -s `which nose` ~/.local/lib/wireshark/extcap/nose
macOS (app bundle)
The following is useful if you want to install the extcap globally, or on older Wireshark versions, assuming "nose" is already installed via Homebrew:
ln -s `which nose` /Applications/Wireshark.app/Contents/MacOS/extcap/nose
The /Applications/Wireshark/ part of the path can be different, depending on where exactly Wireshark is installed. Check the Wireshark about dialog ("Folders" tab) if you are unsure.
You need to start Wireshark at least once before you run the above command. Otherwise, macOS may show a security warning, and it won't work.
Windows
Since Windows does not support symlinks properly, it is recommended to create a .bat file in the Wireshark extcap sub-directory. The installer creates a file named intona-ethernet-debugger.bat with the following contents (assuming default paths and English locale):
"C:\Program Files\Intona\Ethernet Debugger\nose.exe" "%*"
This "redirects" all invocations to the actual installation location.
The user-specific path is C:\Users\USERNAME\AppData\Roaming\Wireshark\extcap\. Replace USERNAME with the actual username. You may need to create the last component of the path. The installer does not try to use this.
Updating Wireshark tends to remove and recreate the Wireshark installation directory. This will also remove the intona-ethernet-debugger.bat file created by the Ethernet Debugger installer. You could run the installer again to fix this. Manually moving the .bat to the Wireshark user-specific configuration path mentioned above avoids this.
Firmware Update
Firmware updates may be required to get new features and to apply bug fixes. Normally they are not necessary. Applying such an update must be done explicitly. The update process rewrites the device's flash memory, and should not be interrupted. Make sure the device is connected via USB 3.0, as the update will take a long time with USB 2.x. Firmware downloads are available here.
Unix-like
Plug in the device, and ensure it's using USB 3.0 (main LED is blue). Then run the following command on the terminal:
nose --firmware-update Downloads/firmware.dat
Where Downloads/firmware.dat is the path to the firmware binary you downloaded.
If the firmware file is accepted, and the device is accessible, something like this will appear:
Firmware file: version 1.08 Select firmware update action: Choice Address Serial Firmware version ------------------------------------------------------- 4 2:7:12 08900037 1.06 ------------------------------------------------------- a Update all devices with outdated firmware b Force update all devices (dangerous) c Do nothing and exit ------------------------------------------------------- Enter your choice:
If you type 4 followed by the enter key, the device 08900037 will be updated. The tool will exit when the update is finished or aborted. On success, the device restarts on its own, and runs the new firmware immediately.
If update fails, the device will boot from a fallback factory image, and indicate the failure by flashing the main LED red. You should retry the update, or if the tool fails again, contact support. If update is slow and takes longer than at most 1 minute, make sure the device is connected via USB 3 instead of USB 2.
You can confirm successful update by comparing the device version number (bcdDevice or checking the output of the hw_info command) with the version indicated by the update.
If the --device option is provided, the tool will update the given device without asking for confirmation. --firmware-update-all will update all detected devices without asking for confirmation. In both cases (at least with v1.2) the firmware is written only if it's newer than the firmware on the device, unless --firmware-update-force is provided.
Old host tool versions (before release v1.2) do not ask for a choice, but start the update with the first device found without confirmation. It is recommended to download and install the newest host tool before performing a firmware update.
Windows
The same instructions as with Unix apply. You can double-click "firmware-update.bat" in Explorer in the Ethernet Debugger installation folder to avoid constructing a command line. This will use the firmware file that came with the installer (it's in the same folder). The latest installer usually comes with the latest release of the firmware. Installers for host tool v1.0 (build 53) do not have this yet; download a newer version here.
(The host tool never "phones home", and there is no automatic update over internet.)
Capturing
The main purpose of the ethernet debugger is to capture packets. The following methods are available.
Wireshark extcap
If you open Wireshark, it should display any plugged in Intona Ethernet Debuggers as Ethernet Debugger USB (08900037) in the list of capture interfaces. The 08900037 in the brackets is the serial number (as in the USB device descriptor). (Some versions of Wireshark also show the device address in the format used by the host tool.) Double click this entry, and Wireshark should start capturing. The Ethernet Debugger's main LED will start blinking.
There is no hotplug mechanism for Wireshark extcaps. If you connect or disconnect devices while Wireshark is running, you may need to press F5 or restart Wireshark to update the device list of Ethernet Debugger capture devices.
Note that if the bandwidth utilization is high, the internal FIFO may overrun, leading to lost packets. The host tool adds a packet comment to the first packet after a run of dropped packets.
It may also happen that Wireshark freezes if the amount of data is too large, because the GUI requires a large amount of resources to deal with packet input. (Capturing to disk via the "nose" tool may help reducing packet drop. You can open the capture file with Wireshark afterwards.)
Various error conditions may deadlock Wireshark and the host tool on capture start.
Capturing Options
Wireshark lets you set some Ethernet Debugger specific options before starting capture. Click on the gear-like symbol left of the Ethernet Debugger interface in Wireshark's Capture interface list.
Wireshark extcap Toolbar
The host tool provides a toolbar in Wireshark. This is implemented through the extcap mechanism. It is slightly clunky due to Wireshark restrictions (all GUI code is provided by Wireshark, and not everything can be realized). The toolbar can be shown by enabling it in the Wireshark "View" menu, "Interface Toolbars" sub-menu.
Directly Starting Wireshark from Host Tool
You may use the --wireshark option of the host tool to start Wireshark and capturing in one go. It attempts to find the installation path of Wireshark, sets up a named FIFO, and starts a new Wireshark process.
nose --wireshark
Lifetime of Wireshark process on Unix
Since host tool version v1.2, Wireshark is not terminated anymore if capturing ends or nose is exited. Older versions always terminated it due to being in the same process session.
Statistics
The host tool --capture-stats option can be used to enable regular statistic updates on the terminal. The "set capture-stats true" command can be used to do this at runtime. (You can enter this command on the Wireshark extcap toolbar, for example.)
Capturing to a File
The host tool --fifo option can be used to capture either to a real file on disk, or a named FIFO. The capture_start command is similar, and can be used to start capturing via the host tool command line or IPC interface. The format of the output is PcapNG (see https://pcapng.com). You may use the third party open source libpcap library to parse such files. If you use an actual FIFO, you can stream in real time.
Note that if you capture to disk, overruns can happen due to waiting on disk I/O. The host tool tries to avoid this by using decoupled memory buffers, but these may be slowly filled up, until a software overrun happens.
# Capturing to a file until Ctrl+C is hit, and log capture statistics to stdout. nose --capture-stats --fifo target_file.pcapng # Manually starting Wireshark. # On terminal 1: mkfifo /tmp/fifo nose --fifo /tmp/fifo # On terminal 2: wireshark -k -i /tmp/fifo
Selecting the Device
If you have multiple Ethernet Debuggers, the --device option can be used to pick a specific device. Passing the special value help to this option lists all devices that were found.
Multi-Capture
Selecting multiple devices at once is not possible. However, if extcap is correctly installed, you can select multiple capture devices in Wireshark. This will provide a merged view of data coming from multiple devices and host tool instances.
Configuring the Buffer Size
The --capture-soft-buffer and --capture-usb-buffer can be used to fine-tune the sizes of the fixed size buffers allocated on the host. Raising them may reduce buffer overruns on the host PC.
Other Features
PoE Passthrough
Both ethernet ports are capable of handling Power over Ethernet (PoE) as specified in IEEE 802.3af, 802.3at and 802.3bt. Power is passed through in both directions without interception.
PTP Timestamps
The device provides high resolution timestamps for packets. This can help to debug PTP related issues, or any other timing issues. These timestamps are in nanoseconds with 10 ns resolution.
Each PHY has its own FIFO, which may affect accuracy. In addition, device-internal CDC may affect the accuracy. Internally, the timestamps are generated by a 100 MHz clock and are passed to the ethernet PHY's (RGMII) clock domain, which introduces jitter. The timestamps are relative to device start.
The host tool capture output adds a start offset to the timestamps to make them roughly line up with wall clock times. However, this offset is not precise, and there is no time correction. The absolute time of a packet event might be slightly different from real time. The longer the capture is running, the higher the deviation will be.
IN3083WP has additional information.
Supported Command Line Options
You can list supported options as follows:
nose --help
Current list of options:
| Name | Description |
|---|---|
| --verbosity 0|1|2 | Set verbosity log level: 0 silent, 1 normal/default, 2 verbose messages |
| --version | Print host software version and exit |
| --selftest | Run internal self-test. (Requires a loop between the two ports.) |
| --selftest-serial | Internal. |
| --wireshark | Start wireshark and dump packets to it. Terminate once done. |
| --device name | Open this device. (Pass "help" to get a list. "none" prevents automatic opening of a device.) |
| --firmware-update file | Perform a firmware update using this file. |
| --firmware-update-all | Update firmware of all devices that have been found. (Since v1.2.) |
| --firmware-update-force | Update firmware even for devices which have the current or newer firmware version. (Since v1.2.) |
| --fifo file | Start capture and write to the given file or fifo. (Overwrites the target if it's a file.) |
| --ipc-connect path | Connect IPC to this socket/named pipe. Terminate on disconnect. |
| --ipc-server name | Host IPC on this socket/named pipe. |
| --capture-soft-buffer num | Capture soft buffer (in bytes, accepts kib/mib/gib suffix) |
| --capture-usb-buffer num | Capture libusb buffer (in bytes, accepts kib/mib/gib suffix) |
| --capture-stats | Show capture statistics every 1 seconds. |
| --extcap-* | Various options for use by the Wireshark extcap mechanism. |
| --capture | Used by Wireshark; ignored by host tool. |
| --strip-frames | Strip preamble, SFD, and FCS from ethernet frames. (Changes pcapng output to LINKTYPE_ETHERNET.) |
| --cmd commands | Run commands on opening. (Must be a single string, separate commands with ; ) (Since v1.3.) |
| --run commands | Run commands after opening. (Syntax like --cmd.) (Since v1.3.) |
| --exit-on | Control when exactly the tool should exit automatically. (Since v1.3.) |
| --exit-timeout | Always exit after the given time of seconds has expired. (Since v1.3.) |
| --capture-speed-test | Test how much USB bandwidth capture needs (discards capture data). (Since v1.5.) |
Interactive Command Line
The host tool has an interactive command line interface. When starting the host tool without commands, it will wait for commands from the terminal. You can use the "help" command to list available commands and their parameters. Many advanced features (such as listed below) are accessible only through this interface.
By default, the host tool will read from stdin and accept commands. It will terminate if stdin is closed or returns EOF. If run on the terminal, it offers an interactive command line using libreadline. (If the host tool was built without libreadline, or you can use the rlwrap 3rd party tool to get comfortable line editing and history:
rlwrap nose <arguments for nose>
Scripting
The host tool can be used for scripting. The --run and --exit-on options (available since host tool v1.3) can be used to run individual host tool commands.
nose --run 'inject A --file mypacket.dat' --exit-on always
(The --exit-on is needed to make the tool exit after running the command.)
For more complicated use cases, the IPC interface offers and out-of-process API. (See IPC Interface section.)
Supported Commands
| Name | Description |
|---|---|
| blink_led | Flash main LED |
| block_ports | Block or unblock all packets |
| capture_start | Start capturing to a file or FIFO |
| capture_stop | Stop current capture |
| cfg_packet | Send internal command to device |
| device_close | Close the current device |
| device_list | List all Ethernet Debuggers connected to this PC |
| device_open | Open a device |
| disrupt | Setup packet disruption and port blocking |
| disrupt_stop | Disable packet disruption and port blocking |
| exit | Exit the host tool |
| help | Show all commands |
| hw_info | Show device information (including firmware version etc.) |
| inject | Setup packet injector |
| inject_stop | Disable packet injector |
| mdio_read | Read a PHY's MDIO register |
| mdio_write | Write a PHY's MDIO register |
| reset_device_settings | Restore default settings on the currently opened Ethernet Debugger |
| set | Set a command line parameter |
| set_device_phy_wait | Configure PHY speed negotiation delay time |
| speed | Configure PHY speed negotiation mode |
| latency_tester_sender | Setup device as latency tester sender (Since v1.3) |
| latency_tester_receiver | Setup device as latency tester receiver (Since v1.3) |
| hw_time_sync | Update device/host time offset for packet timestamps (Since v1.7) |
Some commands are described in further detail in the following sections. The help command lists parameters accepted by each command.
IPC Interface
The command line interface is available via IPC (unix domain sockets on UNIX, named pipes on Windows). This may be useful for scripting or creating GUI frontends. For example, you could inject or drop packets under specific situations, or start/stop capturing at specific times
The IPC server created with --ipc-server is available as long as the host tool runs. The path, at which the IPC communication channel is available, depends on the OS. (The tool prints the full path when it starts the server.)
The --ipc-connect option makes the host tool initiate the IPC connection to the given path. This connection behaves the same as a connection made to a server started with --ipc-server. This mode may be more convenient with certain frameworks, for example when the framework makes it easy to start a server.
Windows
The IPC communication channel is a local win32 named pipe (CreateNamedPipeA()). For example, "nose --ipc-server foo" will create the named pipe \\.\pipe\foo, which can be accessed by other programs in read/write mode. (Starting with host tool v1.3 you can simply pass a full path.) For testing, a third party program such as PuTTY can be used (enter the full named pipe path as a serial device; unfortunately, configuring the terminal to act decently is hard: by default there is no local echo, and CTRL+j must be used to send the required \n ASCII 10 line terminator).
With --ipc-connect, the argument is a full path, which will be passed to CreateFileA(). In theory it can be anything, as long as access with FILE_FLAG_OVERLAPPED works.
UNIX (Linux/Mac)
The IPC communication channel is a Unix domain socket located on /tmp. For example, "nose --ipc-server foo" will create the socket /tmp/too.socket. (If the filesystem entry already exists, it will be deleted, even if it's a normal file.) Since host tool v1.3, the argument can be a full path too (if / or \ appears in the argument, it's considered a full path). For testing, the third party program so cat can be used to interactively send commands:
socat /tmp/foo.socket -
--ipc-connect takes a full path. Both sockets are supported (connect() is used) and other types of files (open() is used).
Protocol
You can send commands in text or JSON form (the help command lists available commands and shows the basic syntax). The protocol uses 1 JSON object per line (in both directions of communication). A line is terminated with \n (ASCII line feed, byte 10). It is fairly self-describing:
{"command":"mdio_read", "phy":1,"address":1,"id":1} // client to host tool
{"id":1,"result":31049,"success":true} // host tool to client
The id field is an arbitrary integer chosen by the client, and can be used to associate requests with replies. The C-style comments are for illustration, and not part of the protocol.
For example, on the shell and with socat, you could do the above by:
$ nose --ipc-server test
$ echo '{"command":"mdio_read","phy":1,"address":1,"id":1}' \
| socat - /tmp/test.socket > /tmp/output.txt
$ cat /tmp/output.txt
{"id":1,"result":31081,"success":true}
A proper client can send multiple commands to the same connection. Replies are always sent immediately, though certain conditions like USB communication failing will block replies until a timeout. Replies are always sent back in order (it cannot happen that the reply for the first request comes after the reply for the second request). Events (such as log messages) can appear at any time, even between request/reply messages.
Log messages (such as output when PHY links change their state) are wrapped into special JSON messages:
{"type":"log","msg":"PHY 1: link=up speed=1000MBit\n"}
Identify Function
The blink_led command will flash the device main LED blue/green for a moment. This is helpful to determine which device is opened on a host tool instance if multiple Ethernet Debuggers are connected to a PC.
Latency Tester
Introduction
This feature (available since host tool v1.3) involves sending generated ethernet packets from one Ethernet Debugger to a second one, and measuring the delay. This can be used to test the latency if a 3rd device, using a setup like this:
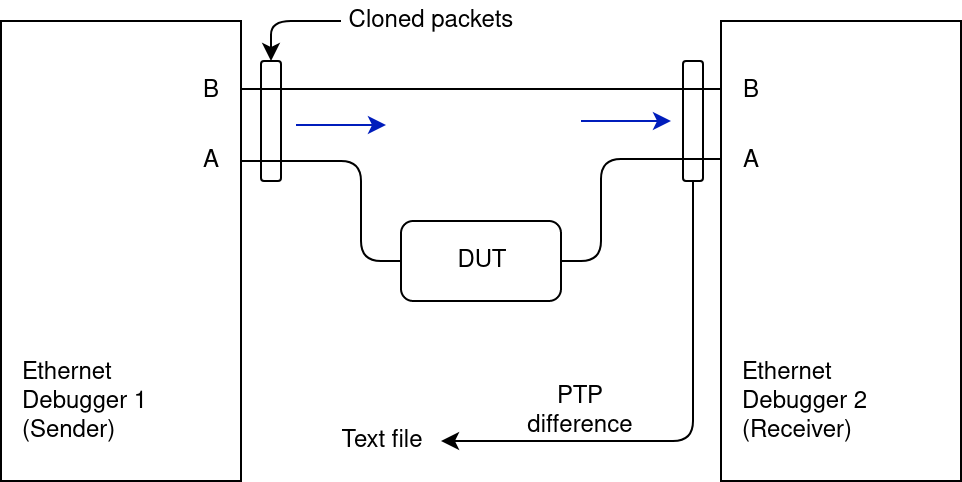
Ethernet Debugger 1 is the sender, Ethernet Debugger 2 is the receiver. The sender generates packets that get sent out of port A and B at the same time. DUT is expected to propagate the packet unchanged to the receiver. The receiver measures the difference in arrival time between port A and B.
The Latency Tester feature takes care of generating/sending the packets and analyzing them on the receiver side. It writes the computed delay time to a text file. The packets use a (hopefully) unused EtherType (0xBEEF). The feature as currently implemented can test at most Layer 2 devices (like ethernet switches). Testing devices that operate on a higher layer (such as IP routers) are not supported, as that would require implementing parts of ARP and IP (though it's theoretically possible).
Instructions
Connect the devices as in the diagram above. On the PC, open two "nose" instances, one for the sender, one for the receiver. Use the device_list command to confirm whether the correct device is opened (change it with the device_open command). Then run the latency_tester_sender command on the sender instance, and latency_tester_receiver on the receiver instance. By default the sender starts sending continuously with 1 packet per 1 ms, with a test sequence that lasts 10 seconds. The receiver ignores the packets until a start packet is detected, and then logs the status every 10 packets (it logs the delay for only the 10th packet, use file output to retrieve all data points).
Device serial1 / 4:2:15 opened. PHY A: link=up speed=1000MBit (master) PHY B: link=up speed=1000MBit (master) > device_list Devices: - 'serial1' (4:2:15) [opened] - 'serial2' (4:2:16) Found 2 devices. > device_open serial2 USB device closed. Device serial2 / 4:2:16 opened. Opening succeeded. PHY A: link=up speed=1000MBit (slave) PHY B: link=up speed=1000MBit (master) > latency_tester_sender Latency tester: new test run (0) Latency tester: new test run (1) Latency tester: new test run (2)
If continuous sending is not desired, you can also just run "latency_tester_sender --once".
Device serial1 / 4:2:15 opened. PHY A: link=up speed=1000MBit (master) PHY B: link=up speed=1000MBit (master) > latency_tester_receiver Starting capture thread succeeded. Receiver setup. Listening to incoming packets. Starting recording sequence... seq=99 diff=-410 seq=199 diff=-410 seq=299 diff=-410
The output gives you an idea whether it actually works. Actual data should be retrieved by using file output. File output can be used with for example:
> latency_tester_receiver --out-file mydata.txt
You may want to use an absolute path here (perhaps using drag & drop from a file manager to get the path) if the concept of working directories is too uncomfortable.
The file is opened when a sequence starts, and closed when it ends. If the file already exists when a sequence starts, the file is not overwritten. Instead, the sequence is skipped repeatedly until the file is deleted or moved by the user. Example:
> latency_tester_receiver --out-file mydata.txt Starting capture thread succeeded. Receiver setup. Listening to incoming packets. File 'mydata.txt' exists, skipping sequence. File 'mydata.txt' exists, skipping sequence. Opened file 'mydata.txt' for writing. Starting recording sequence... seq=99 diff=410 seq=199 diff=410 seq=299 diff=410 seq=399 diff=410 seq=499 diff=410 seq=599 diff=410 ... seq=9899 diff=420 seq=9999 diff=410 Recording sequence finished. Problems detected: no File 'mydata.txt' closed. File 'mydata.txt' exists, skipping sequence. File 'mydata.txt' exists, skipping sequence.
The file mydata.txt was deleted shortly after the receiver was started. The file was then created again and opened for writing. The host program picked up the next sequence of test packets and wrote them to mydata.txt. The sequences after that are skipped because mydata.txt still exists. (It will log two skip messages per sequence, because it encounters a first packet from both paths.) The idea behind this behavior is that tests can be repeated without much interaction, simply by renaming the output file (maybe giving it a more descriptive name), without the danger of accidentally overwriting files.
The output file simply contains the differences in receive timestamps in nanoseconds, with 10 ns resolution:
420 430 410 410 420 410 420 430 410 420 420 420 420 420 420 420
These differences should be roughly equivalent to the latency the DUT incurs on ethernet. The values are positive if the latency values on port A are higher than on port b.
See the "PTP Timestamps" section for details on the quality of the timestamps.
By default, 10000 samples are sent (depending on sender configuration), and the receiver reports "Problems detected: no" only if all samples were included. If you see errors logged on the terminal, there is probably some sort of problem due to packet drop or corruption.
Timestamp synchronization
The problem
The device timestamps packets as they are received. It maintains its own internal clock to generate timestamps. The clock is driven by a 25 MHz quartz oscillator (+/- 30 ppm). The clock runs independently from the host clock. When the host software receives the captured packets, the device timestamps are converted to absolute timestamps simply by adding the offset between device and host clock to them. The offset is determined when starting capture.
If you need precise absolute timestamps, for example when running two Ethernet Debuggers to capture two different networks at once, this will be a problem.
Note: prior to host tool v1.7 and firmware v1.11, the device/host clock offset determination was crude enough to be off by seconds in the worst case. Updating is recommended.
Resynchronizing
You can correct the time offset any time by running the following command in the host tool:
> hw_time_sync
This determines a new offset and "steps" the timestamps of all packets processed after it. It also displays a crude estimate of how much deviation can be expected with time. If "Query delay" shows "0 us" (0 microseconds), the system timer resolution is probably too low to be useful. (Appears to happen on Windows.)
This command is implicitly run when opening the host tool and when starting capture. You can run it manually to resynchronize packet timestamps of packets captured during or following the command.
Packet Injection
It is possible to manually inject new packets into the ethernet connection. As no actual network interface is provided, OS mechanisms (such as sockets) cannot be used. Using the host tool is required.
The inject command provides this functionality. It is possible to send arbitrary ethernet packets, including packets that are not spec-compliant. This is not a high speed send path – full ethernet bandwidth cannot be reached. (Although you can instruct the command to repeat packets, in which case it will produce a high bandwidth stream of the same packet being repeated.)
Use inject_stop to disable the injector again. Use hw_info to check whether it's currently enabled.
CRC errors can be injected. Degenerate packets (too short, IPG too low) can be created with the "raw" parameter. Low level physical layer coding errors can be generated with the "gen-error" parameter (PHY emits symbol error for a specific byte). The IPG can be controlled with the "gap" parameter, which will set the distance to other generated packets as well as packets that are normally transferred through the wire.
Since host tool v1.3, packet data can be read from files with "--file filename".
Since host tool v1.5, the "--bw-packets" and "--bw-bytes" parameters can be used to repeat the packets at a specific bandwidth. --bw-bytes accepts "kib" or "mib" asd suffix for convenience. Using either of the parameters overwrite the "gap" parameter with a value needed to reach the specified bandwidth, and "num" is set to inf. If the "num" parameter passed by the user is not 1 (the default) or inf, or "loop-count" is used, the parameters are silently ignored. If the requested bandwidth cannot be achieved in theory, the command fails. If there is other communication on the ethernet line, the actual bandwidth may be different. If the ethernet speed mode changes, the command has to be run again to set the correct parameters. The bandwidth is computed using the full physical layer packet, and includes preamble/SFD/padding/FCS in the byte count.
Use "help inject" to list all parameters.
Using the command may drop packets coming from the opposite source port. The injection logic will wait until transmission is turned off, then it will inject the packet, and fully drop any other packets from the opposite port.
# Inject a packet that starts with a AB:CD:12:34:56 dest. MAC, # the rest of the packet filled with 0s, on port A (into the # stream of traffic flowing from B to A): inject A ABCD123456
Command parameters
| Name | Possible values | Description |
|---|---|---|
| phy | "A", "B", "AB" | Port to affect. |
| data | Hex string, like "ABCD12" | Packet payload data to append (interpreted as hex string, converted to bytes). E.g. "ABCD" is converted to the 2 byte sequence 0xAB, 0xCD. (Default: empty) |
| raw | "true", "false" | If true, do not add preamble/SFD/CRC to the user provided payload data. (Default: false) |
| num | Integer or "inf" | Repeat mode: how many packets to inject until operation stops. (Default: 1) |
| gap | Integer | Minimum interpacket gap before/after the injected packet in bytes. (Default: 12) |
| append-random | Integer | Append this many random bytes to the payload. The random bytes the same for every injected packet if repeat mode is used. (Default: 0) |
| append-zero | Integer | Append this many zero bytes to the payload. (Default: 0) |
| gen-error | Integer | Offset of byte for which the PHY should generate a symbol error. The offset is into the final, physical layer ethernet packet. A value of -1 disables this. (Default: -1) |
| file | String, path to a file | If not empty, this string is opened as a file, and its contents are used as packet payload data. The "file" or the "data" parameters cannot be used at the same time (one of the parameters have to be set to empty or not provided). Unlike the "data" parameter, the file data is not interpreted as a hex string. (Default: empty) |
| loop-count | Integer | Repeat the payload this often after the end of the packet. Obscure feature to test over-large packets. (Default: 0) |
| loop-offset | Integer | For use with "loop-count". Byte offset into the packet after which data should be repeated. (Default: 0) |
| nopad | "true", "false" | If true, do not pad short packets to mandatory packet length. (Default: false) |
| bw-bytes | Integer, or byte amount ("1kib", "1mib") | Rate of raw bytes per packet. If not 0, this command overwrites the "gap" parameter to reach the requested rate. Packet repeat ("num" parameter) is set to "inf". (Default: 0) |
| bw-packets | Integer | Similar to "bw-bytes", but the parameter specifies the number of packets per second to reach. Ignored if "bw-bytes" is set. (Default: 0) |
The help inject output has some details on allowed value ranges.
Blocking Ports
The block_ports command blocks all traffic through the device in a specific direction:
| Command | Effect |
|---|---|
block_ports A | Block traffic from B→A, unblock A→B |
block_ports B | Block traffic from A→B, unblock B→A |
block_ports AB | Block all traffic |
block_ports none | Unblock all traffic |
This command uses the same hardware logic as the disrupt command (basically it's just a simpler version of the same command). Using either resets the state set by the other command.
Packet Disruption
The disrupt command can be used to drop or to destroy some or all packets in a certain direction. This is a form of error injection suited for testing reliability of low level protocols. It can either flip a single bit in a packet at a user-chosen byte offset, or discard entire packets.
(Restriction: cannot drop specific packet according to filter-like matching criteria etc.)
Use disrupt_stop to disable disruption again. Use hw_info to check whether it's currently enabled.
# Disrupt a number of packets for a short time: # B on port B (traffic flowing from A to B) # --mode drop just drop the packets (instead of creating CRC errors) # --num 20 drop 20 packets in total # --skip 10 drop only every 10th packet (this makes it active for ~200 packets) disrupt B --mode drop --num 20 --skip 10
(The syntax changed in host tool v1.2.)
Command parameters
| Name | Possible values | Description |
|---|---|---|
| phy | "A", "B", "AB" | Port to affect. |
| mode | "drop", "corrupt", "err" | Operation mode. (Default: "drop")
|
| num | Integer or "inf" | Repeat mode: how many packets to disrupt until operation stops. (Default: 1 - disrupt only one packet) |
| skip | Integer | In repeat mode, do not disrupt this number of packets before disrupting another packet. The skipped packets do not count towards the total number of packets to disrupt as set by the "num" parameter. (Default: 0) |
| offset | Integer | Byte to affect with the "corrupt" or "err" operations. The offset is into the final, physical layer ethernet packet. (For example, 0 would disrupt the first byte of the preamble.) Ignored in "drop" mode. (Default: 20 - this is the ethertype field) |
The help disrupt output has some details on allowed value ranges.
MDIO Access
Raw MDIO access
The mdio_read and mdio_write commands provide direct access to the PHY's MDIO registers. Access to register 22 is intercepted/emulated by the firmware.
Changing PHY Ethernet Speed
Ethernet speed is controlled by the PHYs. By default, they are set to use a common speed, and the firmware automatically adjusts the PHYs to use the slowest negotiated speed of either PHY (devices with firmware 1.00 do not support this behavior - you need to set the speed manually).
You can use the speed command to force specific speed modes on both PHYs:
| Speed | Command |
|---|---|
| 1000 MBit (full duplex) | speed 1000 |
| 100 MBit (full duplex) | speed 100 |
| 10 MBit (full duplex) | speed 10 |
| 1000 MBit (half duplex) | speed 1000half |
| 100 MBit (half duplex) | speed 100half |
| 10 MBit (half duplex) | speed 10half |
| Highest common speed mode of both PHY | speed same |
| Manual control | speed manual |
The same mode puts the PHYs into auto negotiation mode at first, and if the speed modes mismatch, the faster PHY is forced into a lower speed mode. If a link goes down and up again, the process is repeated. Technically, the process can re-establish the link multiple times, which makes it slower and may be annoying when troubleshooting connected devices. The set_device_phy_wait command can be used to set the fixed time after which the state machine assumes the PHY cannot establish a link.
The manual mode lets each PHY negotiate the speed independently, which will lead to problems if the device's port A and B PHYs do not negotiate the same speed. This mode is useful only if you want to manipulate the MDIO registers directly, or maybe for checking what each link ends up with auto negotiation.
The values set by the "speed" and the "set_device_phy_wait" commands are stored as permanent settings on the device.
Older host tool versions do not have the "same" mode implemented, and require the user to manually correct speed modes. Even older versions do not even offer the "speed" command, and require using manual mdio_write commands. In addition, the "same" mode requires at least version 1.06 firmware. In addition, the half duplex modes are available only since version 1.08 firmware. Older versions will always use full duplex, and disable auto negotiation, which tends to make connected PHYs go into half-duplex mode.
Device Settings
Since firmware 1.06, the device persistently stores some settings on its EEPROM. You can inspect these settings with the "hw_info
" command. You can clear all persistently stored settings with the "reset_device_settings" command. Power cycle the device after running the latter command successfully in order to clear any runtime state (PHY registers, inject/disrupt features).
Known Problems
- If no ethernet is connected, or there are no packets on the wire at all, the host tool may not terminate properly, even if Wireshark is terminated. This happens because the host tool will never write to the pipe to Wireshark. The host tool will continue to run in the background, and will block access to the device. In this case, the LED will continue blinking, and you may have to kill the host tool manually. This problem should not occur with host tool v1.2, which has a workaround that terminates it after a one second timeout.
- If extcap is used, and start of capture fails (such as inaccessible device), Wireshark does not terminate gracefully. This seems to be a Wireshark issue.
- If extcap is used, and capturing errors (such as unplugging the Ethernet Debugger device), Wireshark does sometimes not notice that capturing terminated.
- If extcap is used, Wireshark sometimes gets into a mode in which the Wireshark GUI seems to indicate that capturing started correctly, but the host tool is blocked trying to open Wireshark's extcap control pipes. Restarting Wireshark helps (you may need to kill the blocked "nose" process as well).
- Firmware versions before 1.08 had issues with 10/100 MBit modes.
If you encounter problems, always update to the latest firmware version and host tool, available here.
Further Readings
White Papers
Ethernet Debugger Timing
The Ethernet Debugger can be used to intercept and capture traffic between two Ethernet devices. The device is normally not supposed to affect the Ethernet traffic itself. But for technical reasons, the device can affect the traffic by introducing additional latency and jitter compared to a simple Ethernet cable. This effect is minimal, but can matter for real time applications such as PTP. The goal of this document is to provide information about the introduced latency and jitter, as well as actual measurements.
Statements
Letter of Volatility
This letter describes volatile, non-volatile, and storage media on the specified product. Customers can use this document to comply with security requirements and equipment handling procedures.
Document version: 119 / Okt 07, 2025 17:38
Download this document as PDF